工业机器人为什么要用到减速机?
在工业机器人领域,刚开始接触机械领域的同学可能会好奇:为什么不直接用电机来控制机器人的关节运动呢?其实,工业机器人的动力源通常是交流伺服电机,它能够根据脉冲信号灵活调节转速,那么加上减速机是否显得多此一举呢?今天,我们就来揭秘减速机的神秘面纱,分析它在工业机器人中的重要作用。
什么是减速机?
根据维基百科的定义,减速机是一种独立的闭式传动装置,主要用于降低转速并增大扭矩,以满足各种机械工作的需求。那么,为什么需要降低转速和增大扭矩呢?让我们通过齿轮运动来一探究竟。
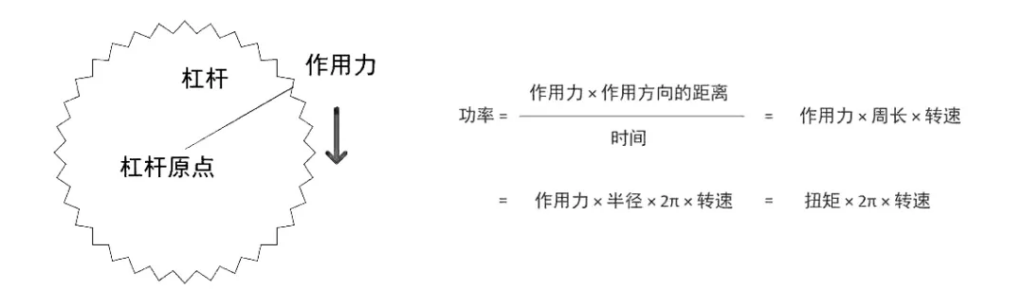
在分析齿轮的功率计算时,可以将齿轮想象成一个杠杆。齿轮的接触点是杠杆的力臂末端,而齿轮的圆心则是杠杆的支点。通过这样的简单化,我们可以得出一个公式:在相同功率下,转速与扭矩成反比。因此,减速机的设计正是为了降低转速的同时提高扭矩,确保机器能够在各种工况下稳定运行。
工业机器人的实际需求
让我们看看工业机器人的实际需求:

>> 承受重力扭矩:工业机器人的关节需要承受后端机构因重力产生的扭矩,这对减速机提出了高要求。
>> 稳定的转速:这些关节的转速通常不高,伺服电机在极低速度下运转会导致控制不稳定,因此需要减速机来保持电机在合理转速下平稳运行。
>> 高精度要求:高精度的定位和重复定位是工业机器人完成任务的必要条件,减速机在此过程中发挥了重要作用。
为了解决以上问题需要在扭矩、电机转速和精度三方面找到有效的解决办法,而减速机就能轻松解决这些问题。
通过使用减速机,例如一个50:1的减速机,可以将额定100mNm的电机扭矩提升至5Nm。如果直接使用5Nm的电机,则需要更大体积以保证输出功率,并且电流增大会导致电机过热,缩短使用寿命。而使用减速机的电机发热量仅为原来的1/2500,极大提升了运行的安全性与可靠性。
控制精度的提升
工业机器人关节的转速通常只有每秒一两转,而一台额定100mNm的电机可轻松达到6000转/分钟。虽然增加电压可以提高转速,但必须考虑轴承和转子的承受能力。使用减速机后,转速控制会更加精确,减少因量化产生的高频噪声,使运动更加平稳。减速机使得转子等效的转动惯量提高到了2500倍,增强了控制环路的稳定性。

应用案例
在关节型机器人中,常用的减速机有:RV减速机、谐波减速机、环面包络蜗轮蜗杆减速机。RV减速机具有较高的刚度和回转精度,适合在重负载位置使用,而谐波减速机则多用于小臂、腕部等位置。环面包络蜗轮蜗杆减速机天然90°输出的结构,多齿啮合的设计也让其具有极大的扭矩和精度,也很适合在各类型关节处,目前在灵巧手关节处,也有他们的身影,其成本相较于RV减速机较低。它们各自的设计特点,使得工业机器人能够在不同的作业场景中展现出优越的性能。
减速机在工业机器人中的作用不可或缺,它帮助机器人在各种工况下实现高效、稳定的运作。高价格的减速机反映了市场的技术壁垒,它对材料科学、精密加工和装配技术等有着极高的要求,因此制造出优质的减速机并非易事。
如果您觉得这些知识对您有所帮助,请分享给更多的朋友,我们下期再见!
